豊橋技術科学大学では、「メタバースの活用と技科大リソースマネジメントによる研究教育システムの価値向上と財政基盤の拡大」取組の一環として、基盤となる各種メタバースコンテンツの開発を進めています。2023年度に、さらなるテック・メタバースの拡充を目的として、経営改革促進事業に資する新たなコンテンツ開発プログラムを公募し、16のコンテンツ開発を支援しました。このうち一部をご紹介します。
■名称
機械システムの制御教育用メタバース構築
■目的
産業機械、移動ロボットなどの制御教育を効果的に行うことを目的としています。実際の産業機械や移動ロボットの動作や環境計測により、現実的な特性を考慮したメタバース構築を目指します。
■内容
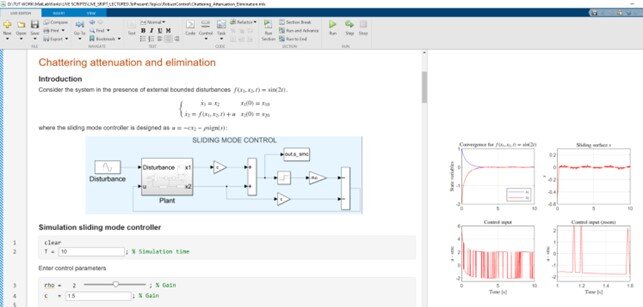
機械システムの制御教育用メタバース構築のために、代表的な産業機械の一つであるクレーンのモデルを構築、動作確認を行いました。MATLAB Live Editor では、プログラム・テキスト・グラフ・動画などを扱うことができ、受講者は制御系設計において制御方法や各種パラメータ値を変更し、性能を動画やグラフなどで確認することができます。図1は構築したLive Scriptの例です。
 (図1)
(図1)
この方式を用いて、古典/現代制御に関する講義コンテンツを作成し、受講生はPID制御、状態フィードバック制御、ロバスト制御、適応制御などを学ぶことができます。
■実際の活用事例
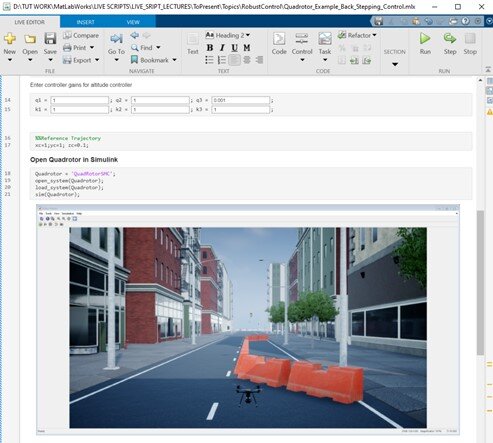
学習内容の一項目であるスライディングモード制御の教育コンテンツについて説明します。受講生はスライディングモード制御の理論を学習した後に、ドローンの動作に応用し有効性を確認することができます。図2のようなScriptにおいて受講生は各種パラメータを設定後、ドローンシミュレーション環境を起動します。
 (図2)
(図2)
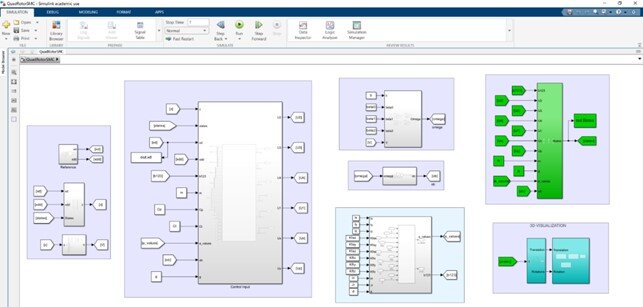
図3のようなドローンの動特性モデルが用意され、制御系の動作確認に利用できるとともに、動特性モデルの構築方法を学ぶための参考にすることができます。
 (図3)
(図3)
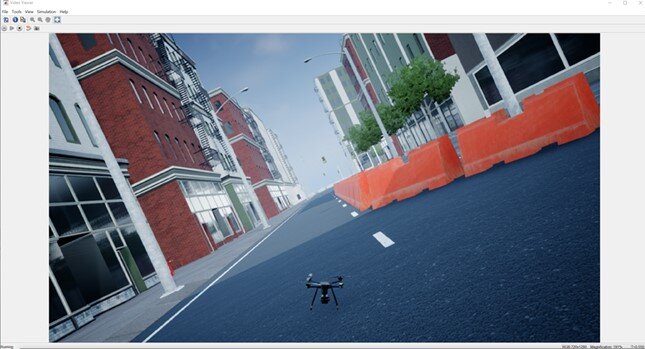
図4のように,受講生自身で設計した制御系をドローン動特性モデル応用し,動作を検証できます。
 (図4)
(図4)