長岡技術科学大学では、「メタバースの活用と技科大リソースマネジメントによる研究教育システムの価値向上と財政基盤の拡大」を目指した取組の一環として、基盤となる各種メタバースコンテンツの開発を進めています。さらなるテック・メタバースの拡充を目的として、コンテンツを構築していますので、このうちの一部をご紹介します。
■名称
ロボットアーム制御シミュレーター
■背景
長岡技術科学大学で行っている講義「サーボモーターの制御」では、令和5 年度までは単に 1 軸のモーターを動かす実験のため、学生たちは退屈そうでした。そこでロボットを動かすことにしました。しかし、本物のロボットに誤った制御データを送信してしまうと、ロボットが思いもかけない動きをして人を危険な目に合わせたり、モーターに許容以上の電流が流れて故障してしまったりというリスクが大きいことが課題でした。
この解決策になったのがメタバースでした。
■メタバースの活用
メタバース空間上にあるロボットにPC から制御データを送り、動かします。ロボットには 6 軸分のモーターが搭載されています。ロボットの動きは PC の画面上だけでなく、ヘッドマウントディスプレイでリアルに見ることもできます。本物のロボットではないため、ミスしても何の危険も起きず、安心してモーターの制御を学ぶことができます。学生には、自由にプログラミングしてもらうようにしています。メタバース空間上にボールも用意してあり、ロボットを上手く動かして、ボールを蹴ることもできます。時間を忘れて没入する学生も多いです。
■本システムの特徴
本システムのベースは、メタバース、リアルどちらのロボットも共通です。技術的な特徴は、力制御と振動制御ができることです。特に、ロボットの力制御系における振動抑制制御は世界的にも稀で、本システムで体感的に学ぶことができます。振動を抑制することで、より高い精度での制御が可能となります。したがって、これまでロボット化が難しかった職人芸と言われるような細やかな作業においても、活用が見込まれます。人手不足がますます進む社会への貢献が期待されています。
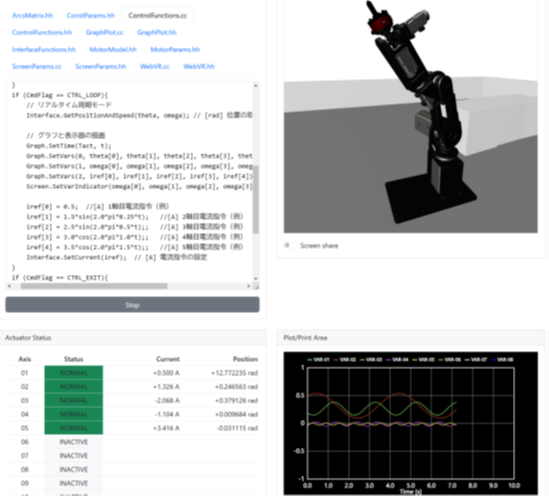
ブラウザ上でコードを読ませると動画でシミュレーションされます

ヘッドマウントディスプレイで没入して確認することもできます

実際にロボットを動かすこともできます。遠隔操作も可能になります